Peter Lobner
Los Mechs (también conocidos como «mecánicos» y «mechas») son robots pilotados que se distinguen de otros vehículos pilotados por su apariencia humanoide / biomórfica (es decir, emulan la forma general de los seres humanos u otros organismos vivos). Los mechs pueden proporcionar al piloto fuerza sobrehumana, movilidad y acceso a una variedad de herramientas o armas, a la vez que brindan protección contra entornos peligrosos y condiciones de combate. Muchas novelas y películas de ciencia ficción han empleado mechs en varios papeles. Ahora, la tecnología ha avanzado hasta el punto de que el primer mech práctico está en desarrollo y entrando en la fase de prueba piloto.
Ejemplos de mechs humanoides en ciencia ficción
Si viste la película Avatar de James Cameron de 2009, entonces has visto el traje de Plataforma de Movilidad Amplificada (AMP) pilotado que se muestra a continuación. En la película, este mech multipropósito protege al piloto contra condiciones ambientales peligrosas mientras realiza una variedad de tareas, incluido el levantamiento pesado y el combate armado. El concepto de AMPLIFICADOR, tal como se aplica en Avatar, se describe en detalle en el siguiente enlace:
http://james-camerons-avatar.wikia.com/wiki/Amplified_Mobility_Platform
![]() Traje de amplificador de avatar. Fuente: avatar.wikia.com
Traje de amplificador de avatar. Fuente: avatar.wikia.com
La película de Guillermo del Toro de 2013, Pacific Rim, presentó los mechs Jaeger pilotados mucho más grandes diseñados para luchar contra criaturas del tamaño de Godzilla.
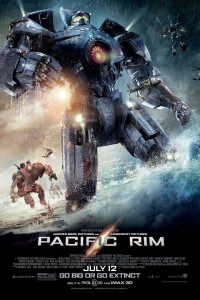 Jaegers. Fuente: Warner Bros Pictures
Jaegers. Fuente: Warner Bros Pictures
Mechs de combate reales
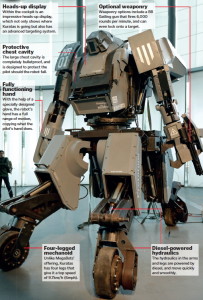
Uno de los primeros mechs reales fue Kuratas; un mech manejable y operado por el usuario desarrollado en Japón en 2012 por Suidobashi Heavy Industry para competiciones de mech de lucha. El torso humanoide de Kuratas está apoyado por cuatro patas, cada una montada sobre una rueda hidráulica. Este mech con motor diesel mide 4,6 metros (15 pies) de altura y pesa unas cinco toneladas.
 Kuratas. Fuente: howthingsworkdaily.com
Kuratas. Fuente: howthingsworkdaily.com
Suidobashi Heavy Industry utiliza su propio sistema operativo propietario, V-Sido OS. El software del sistema integra rutinas para el equilibrio y el movimiento, con el objetivo de optimizar la estabilidad y evitar que el mech se caiga en superficies irregulares o durante el combate. Si bien Kuratas está diseñado para ser operado por un solo piloto, también se puede operar de forma remota mediante un teléfono con conexión a Internet.
 Cabina de Kuratas. Fuente IB Times UK
Cabina de Kuratas. Fuente IB Times UK
Para obtener más información sobre el diseño y el funcionamiento de Kuratas, vea el video de la Industria Pesada de Suidobashi en el siguiente enlace:
También visite el sitio web de la Industria Pesada de Suidobashi en el siguiente enlace:
http://suidobashijuko.jp
Parece que puede comprar sus propias Kuratas en Amazon Japón por ¥ 120,000,000 (aproximadamente $1.023 millones) más los gastos de envío. Aquí está el enlace en caso de que esté interesado en comprar un Kuratas.
https://www.amazon.co.jp/水道橋重工-SHI-KR-01-クラタス-スターターキット/dp/B00H6V3BWA/ref=sr_1_3/351-2349721-0400049?s=hobby&ie = UTF8& qid=1483572701& sr = 1-3
Encontrará un nuevo vídeo de orientación para el propietario en el siguiente enlace:
Un competidor en el fighting mech arena es el MegaBot Mark II de 4,6 metros (15 pies) de altura y 5,4 toneladas construido por la compañía estadounidense MegaBots, Inc. El torso del Mark II está apoyado por un armazón articulado impulsado por dos bandas de rodadura de tanque que proporcionan una base estable y propulsión.
 MegaBot Mark II. Fuente: howthingsworkdayy.com
MegaBot Mark II. Fuente: howthingsworkdayy.com
Los controles de Mark II se basan en el sistema operativo Robot OS (ROS) ampliamente utilizado, que los desarrolladores del sistema operativo describen como:
«….un marco flexible para escribir software de robot. Es una colección de herramientas, bibliotecas y convenciones que tienen como objetivo simplificar la tarea de crear un comportamiento robótico complejo y robusto en una amplia variedad de plataformas robóticas.»
Para obtener más información, visite el sitio web de ROS en el siguiente enlace:
http://www.ros.org/about-ros/
Se ha propuesto una batalla real entre Kuratas y MegaBot Mark II (desde 2014), pero se ha retrasado muchas veces. En octubre de 2016, MegaBots, Inc. determinó que el Mark II no era seguro para la lucha cuerpo a cuerpo de mech y anunció que abandonaría este diseño. Su reemplazo será un Mk III más grande (10 toneladas) con una cabina más segura, un motor más potente, una velocidad más alta (10 mph) y válvulas hidráulicas de acción más rápida. El desarrollo y operación de MegaBot Mark III se muestra en una serie de videos de 2016 en el siguiente enlace:
https://www.megabots.com/episodes
He aquí un vistazo a un torso MegaBot Mark III (unido a una base de prueba en lugar de la base real) a punto de recoger un automóvil durante las pruebas de desarrollo.
 MegaBot Mark III. Fuente: MegaBot
MegaBot Mark III. Fuente: MegaBot
El interés mundial en el combate de lucha Kuratas-MegaBot ha generado interés en una futura liga de lucha mech.
Mechs reales potencialmente útiles
La firma surcoreana Hankook Mirae Technology ha desarrollado una máquina de cuatro metros de altura (13 pies), 1.mech humanoide bípedo de 5 toneladas llamado Método v2 como banco de pruebas para varias tecnologías que se pueden aplicar y escalar para futuros mech operativos. El método v2 no tiene una fuente de alimentación interna, sino que recibe energía eléctrica a través de una correa de una fuente de alimentación externa.
El presidente de la compañía, Yang Jin-Ho, dijo:
» Nuestro robot es el primer robot bípedo tripulado del mundo y está construido para trabajar en áreas extremadamente peligrosas donde los humanos no pueden ir (sin protección).»
Vea los detalles en el sitio web de Hankook Mirae en el siguiente enlace:
http://hankookmirae.tech/main/main.html
Como es evidente en las fotos a continuación, el Método v2 tiene más que un parecido pasajero con el traje de AMPLIFICADOR en Avatar.
 Método v2. Fuente: Tecnología Hankook Mirae
Método v2. Fuente: Tecnología Hankook Mirae
Un piloto sentado dentro del torso del robot realiza movimientos de las extremidades que son imitados por el sistema de control Method v2.
 El torso del método v2 imita los movimientos del brazo y de la mano del piloto. Fuente: Tecnología Hankook Mirae
El torso del método v2 imita los movimientos del brazo y de la mano del piloto. Fuente: Tecnología Hankook Mirae
 Cabina del método v2. Fuente: Tecnología Hankook Mirae
Cabina del método v2. Fuente: Tecnología Hankook Mirae
La primera operación piloto del Método v2 mech tuvo lugar el 27 de diciembre de 2016. Vea un video corto de pruebas tripuladas y una prueba de caminata no tripulada en el siguiente enlace:
https://www.youtube.com/watch?v=G9y34ghJNU0
Puedes leer más sobre la prueba en el siguiente enlace:
http://phys.org/news/2016-12-avatar-style-korean-robot-baby.html