Peter Lobner
Mechs(別名「メカニカル」および「メカ」)は、人型/生物形態の外観(すなわち、人間または他の生物の一般的な形 Mechsは危険な環境および戦闘条件からの保護を提供している間操縦者に用具または武器の配列への超人間の強さ、移動性およびアクセスを与えるこ 多くのsf小説や映画は、様々な役割でメカを採用しています。 今、技術は最初の実用的な機械が開発中であり、操縦されたテスト段階に入ることポイントに進みました。
サイエンス-フィクションにおけるヒューマノイドメックの例
2009年のジェームズ-キャメロンの映画”アバター”を見た場合、以下に示すパイロット型増幅モビリティプラットフォーム(AMP)スーツを見たことがある。 映画では、この多目的メカは、重い持ち上げや武装戦闘を含むさまざまなタスクを実行しながら、危険な環境条件からパイロットを保護します。 アバターで適用されるAMPの概念は、次のリンクで詳細に説明されています:
http://james-camerons-avatar.wikia.com/wiki/Amplified_Mobility_Platform
![]() アバターアンプスーツ。 ソース:avatar.wikia.com
アバターアンプスーツ。 ソース:avatar.wikia.com
2013年のギレルモ-デル-トロの映画”パシフィック-リム”では、ゴジラサイズの生き物と戦うために設計されたはるかに大きな操縦されたジャガー-メカが登場した。
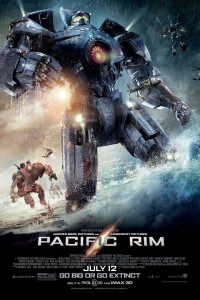 Jaegers. 出典:ワーナー-ブラザース-ピクチャーズ
Jaegers. 出典:ワーナー-ブラザース-ピクチャーズ
実際の戦闘メカ
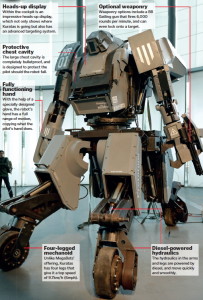
最初の実際のメカの一つは、2012年に水道橋重工業が戦闘メカ競技のために日本で開発した乗用、ユーザー操作メカであるKuratasであった。 クラタスの人型胴体は4本の脚で支えられており、それぞれが油圧駆動の車輪に乗っています。 このディーゼル動力のメカは、高さ4.6メートル(15フィート)で、約五トンの重さです。
 ソース:howthingsworkdaily.com
ソース:howthingsworkdaily.com
水道橋重工業は、独自のオペレーティングシステムであるV-Sido OSを使用しています。 システムソフトウェアは安定性を最大限に活用し、機械が不均等な表面でまたは戦闘の間に落ちることを防ぐことの目的のバランスおよび動き Kuratasは単一の操縦者によって操作のために設計されている間、またインターネット可能にされた電話によって遠隔に作動させることができる。
 Source IB Times UK
Source IB Times UK
クラタスの設計と運用に関する詳細は、以下のリンクで水道橋重工業のビデオをご覧ください:
また、以下のリンクで水道橋重工業のウェブサイトをご覧ください:
http://suidobashijuko.jp
Amazon Japanで自分のKuratasを120,000,000円(約1.023百万円)プラス送料で購入できるようです。 あなたがKuratasを購入することに興味がある場合のリンクはここにあります。
あなたは次のリンクで新しい所有者のオリエンテーションビデオを見つけることができます:
ファイティングメックアリーナのライバルは、アメリカのメガボッツ社によって建設された高さ4.6メートル(15フィート)、5.4トンのメガボットマークIIである。 マークIIの胴体は、安定したベースと推進力を提供する二つのタンク踏面によって駆動される関節フレームワークによってサポートされています。
 メガボットマークII.出典:howthingsworkdaily.com
メガボットマークII.出典:howthingsworkdaily.com
Mark IIのコントロールは、広く使用されているRobot OS(ROS)オペレーティングシステム上に構築されています。:
“….ロボットソフトウェアを書くための柔軟なフレームワーク。 これは、さまざまなロボットプラットフォーム間で複雑で堅牢なロボット動作を作成するタスクを簡素化することを目的としたツール、ライブラリ、およ”
詳細については、以下のリンクでROSのウェブサイトをご覧ください:
http://www.ros.org/about-ros/
2014年以降、クラタスとメガボットマークIIの実戦が提案されているが、何度も延期されている。 2016年10月、株式会社メガボットが設立されました。 Mark IIはハンド・ツー・ハンド・メカの戦闘には安全ではないと判断し、この設計を放棄すると発表した。 その取り替えはより安全な操縦室、より強力なエンジン、より高い速度(10mph)およびより速く機能する油圧弁が付いているより大きい(10トン)Mk IIIである。 MegaBot Mark IIIの開発と運用は、以下のリンクで2016年の一連のビデオで示されています:
https://www.megabots.com/episodes
ここでは、開発テスト中に車をピックアップしようとしているMegaBot Mark III胴体(実際のベースの代わりにテストベースに取り付けられています)を見ています。
 Megabot Mark III出典:Megabot
Megabot Mark III出典:Megabot
Kuratas–MegaBot fighting matchへの世界的な関心は、将来のmech fighting leagueへの関心を生み出しました。
実際の潜在的に有用なメカ
韓国の企業Hankook Mirae Technologyは、高さ13フィート(1フィート)の高さを開発しました。5トンの二足歩行ヒューマノイド-メカは、将来の運用メカに適用され、スケールすることができる様々な技術のテストベッドとしてMethod v2を命名しました。 方法v2には内部電源がありませんが、代わりに外部電源からテザーを介して電力を受け取ります。
ヤン-ジンホ会長は次のように述べた。
“私たちのロボットは世界初の有人二足歩行ロボットであり、人間が行くことができない(保護されていない)極端な危険な地域で動作するように構築されている。”
以下のリンクでハンコックミラエのウェブサイト上の詳細を参照してください:
http://hankookmirae.tech/main/main.html
下の写真で明らかなように、メソッドv2は、アバターのアンプスーツを通過類似以上のものを持っています。
 メソッドv2。 出典:Hankook Mirae Technology
メソッドv2。 出典:Hankook Mirae Technology
ロボットの胴体の内側に座っているパイロットは、Method v2制御システムによって模倣された四肢の動きを作ります。
 メソッドv2トルソーはパイロットの腕と手の動きを模倣します。 ソース:Hankook Mirae Technology
メソッドv2トルソーはパイロットの腕と手の動きを模倣します。 ソース:Hankook Mirae Technology
 Method v2cockpit。 ソース: Hankook Mirae Technology
Method v2cockpit。 ソース: Hankook Mirae Technology
2016年12月27日、Methodv2mechの最初の操縦操作が行われました。 次のリンクで有人試験と無人歩行試験の短いビデオを見る:
https://www.youtube.com/watch?v=G9y34ghJNU0
テストの詳細は、次のリンクで読むことができます:
http://phys.org/news/2016-12-avatar-style-korean-robot-baby.html